 |
| OpenSCAD |
 |
| First try |
The code to create the image above:
module PencilHinge() { hole_width = 8.1; hole_count = 8; total_width = 98; projection_count = 9; projection_width = (total_width-(hole_count*hole_width)) / projection_count; difference() { union() { cube([98, 15, 14], center = true); } union() { for ( i = [0:7] ) { translate(v=[i *(hole_width+projection_width)-(total_width/2)+hole_width,0,4]) { cube([8.1, 16, 16], center = true); } } translate(v=[0, 0, 1]) { rotate(a = [0, 90, 0]) { cylinder(h = 100, r=1, center = true); } } } } } PencilHinge();
After playing one hour with it I came up with the design above. When you look at the full size image you can see that the holes are not round, but consist of just seven flat surfaces.
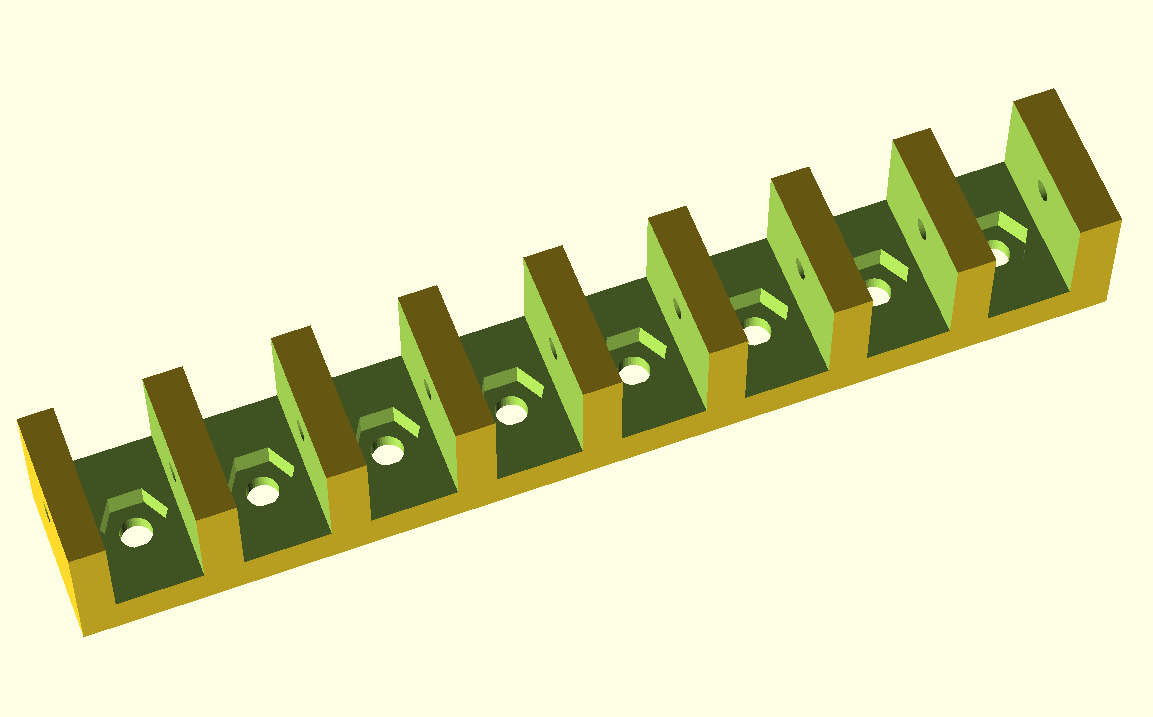 |
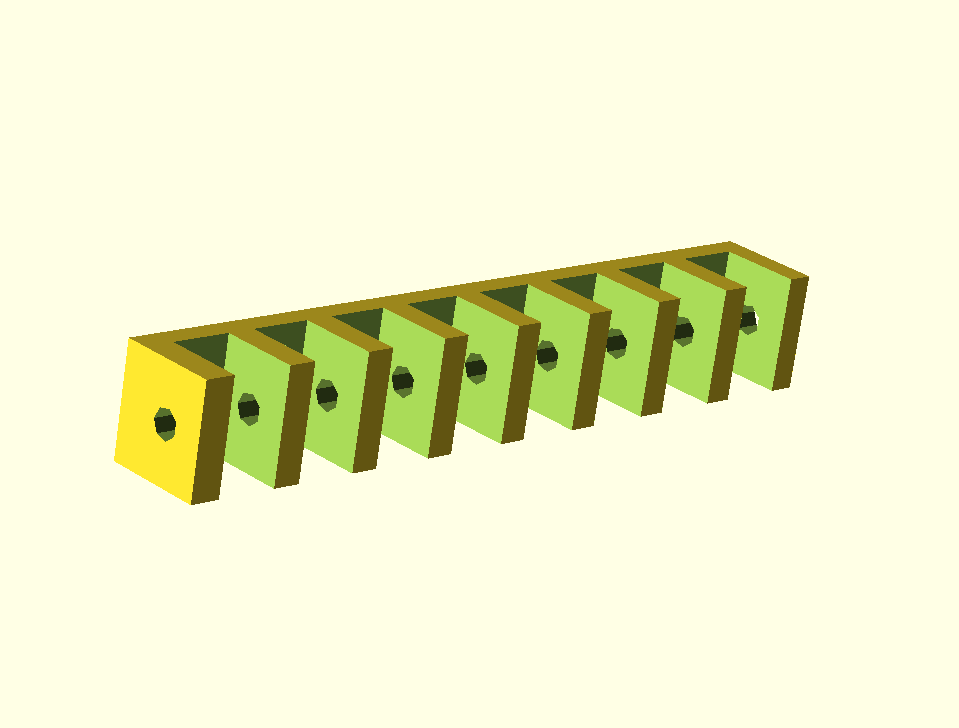
| Second iteration |
A second night working on it I found out that you can set the number of surfaces used to make the cylinder holes: I had to add $fn=36 to the creating of the cylinder. Where 36 is the number of surfaces: cylinder(h = 100, r=2, center = true, $fn=36); I added eight holes in the bottom plate to be able to mount it to the robot frame. The holes for the nuts were, easy now that I now how to set the number of surfaces of the cylinder. I just needed six surfaces for that.
The code for the image above:
module PencilHinge() { // Sizes in mm round_r = 3; pad = 0.1; mounting_hole_radius = 1.5; mounting_nut_r = 6.3 / 2; mounting_nut_h = 2.5; mounting_nut_facets = 6; hole_count = 8; projection_count = hole_count + 1; hole_width = 8.1; box_l = 98; box_w =15; box_h = 14; projection_width = (box_l-(hole_count*hole_width)) / projection_count; difference() { union() { // The main part cube([box_l, box_w, box_h], center = true); } union() { for (i = [0:7]) { translate(v=[i *(hole_width+projection_width)-(box_l/2)+hole_width,0,4]) { // Holes to hold the pencils cube([hole_width, box_w+pad, box_h], center = true); // Mounting hole cylinder(h = box_l, r=mounting_hole_radius, center = true, $fn=36); // Nut hole cylinder(h = (mounting_nut_h*2)+box_h, r=mounting_nut_r, center = true, $fn=mounting_nut_facets); } } // The axle translate(v=[0, 0, 3]) { rotate(a = [0, 90, 0]) { cylinder(h = box_l+pad, r=1, center = true, $fn=36); } } } } } PencilHinge();
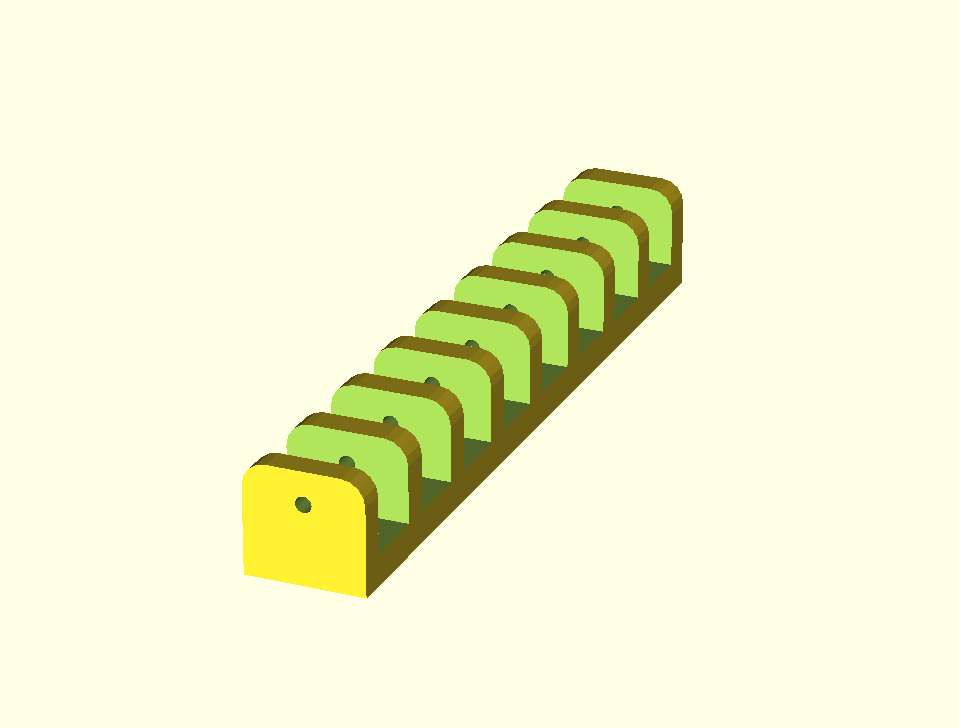 |
| Final design |
It took a third night to come to the final design shown in the image above, with nice rounded corners. I used the cube fillet module for that. I only had the replace cube([box_l, box_w, box_h], center = true); by cube_fillet([box_l, box_w, box_h], vertical=[0,0,0,0], top=[round_r,0,round_r,0], center=true); Note that the cube filet code to get the rounded corners is bigger in size than the pencil hinge code.
No comments:
Post a Comment